
团队研发了手术视觉当行定位系统,采用多相机系统对带有视觉标签的手术 器具进行实时定位和目标跟踪,视觉标签采用非对称分布的红外反射球,支持有 源和无源两种视觉标签。其中高速高分辨率红外摄像机采用内置 850nm 红外光源 阵列,120 万像素红外 CCD,配合宽焦距范围镜头,视场角度可达 90°以上。为 减小系统延时,提高手术医生的体验感,研究基于 FPGA 的视觉数据并行计算定 位算法,在相机本地通过 FPGA 快速计算得到单视角的定位数据,配合高速以太 网标准的数据传输总线,能够达到 200 帧以上的满分辨率传输。中央控制器实时 收集多个相机的目标定位数据,进行信息融合计算,得到手术器具的高精度实时 6 自由度位姿。以上提供的基于多相机分布式计算、以太网高速传输和中央控制 器信息融合的方案,不仅适用于单目标定位跟踪,也支持多目标的同时定位跟踪, 这为手术中采用多个手术器具同时进行手术导航提供保障。
投资500万
在相机本地通过 FPGA 快速计算得到单视角的定位数据,配合高速以太网标准的数据传输总线,能够达到 200 帧以上的满分辨率传输。
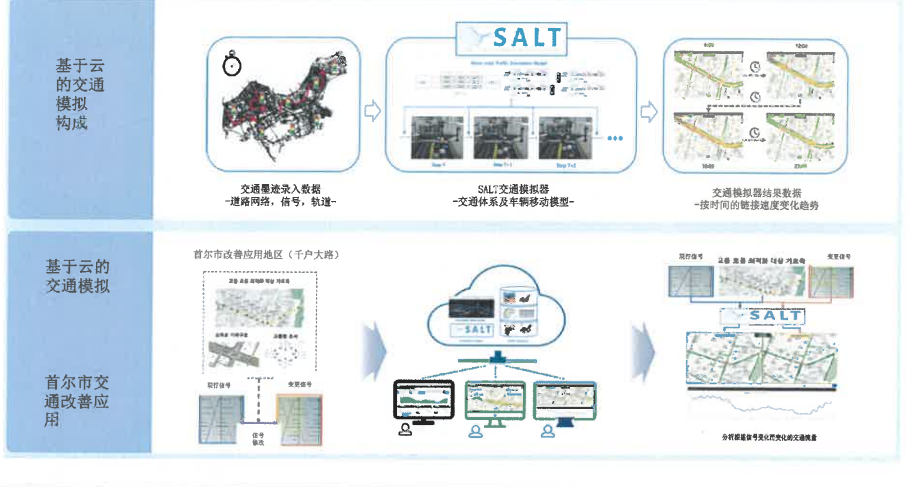
基于云的流量模拟器软件

技术茂
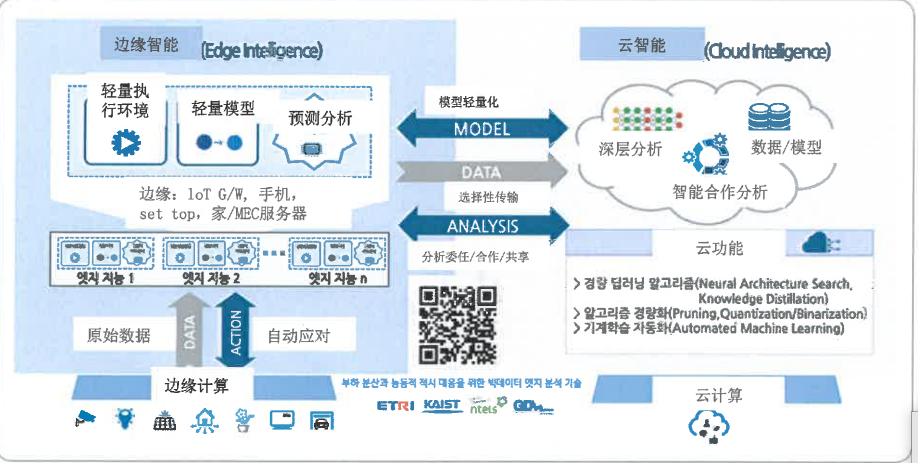
大数据边缘分析技术
技术茂






